VIGU-Sim: Betaflight SITL & Unity Drone Simulator
High-Fidelity Autonomous Flight Tests in a Risk-Free Environment



Project Details
Description
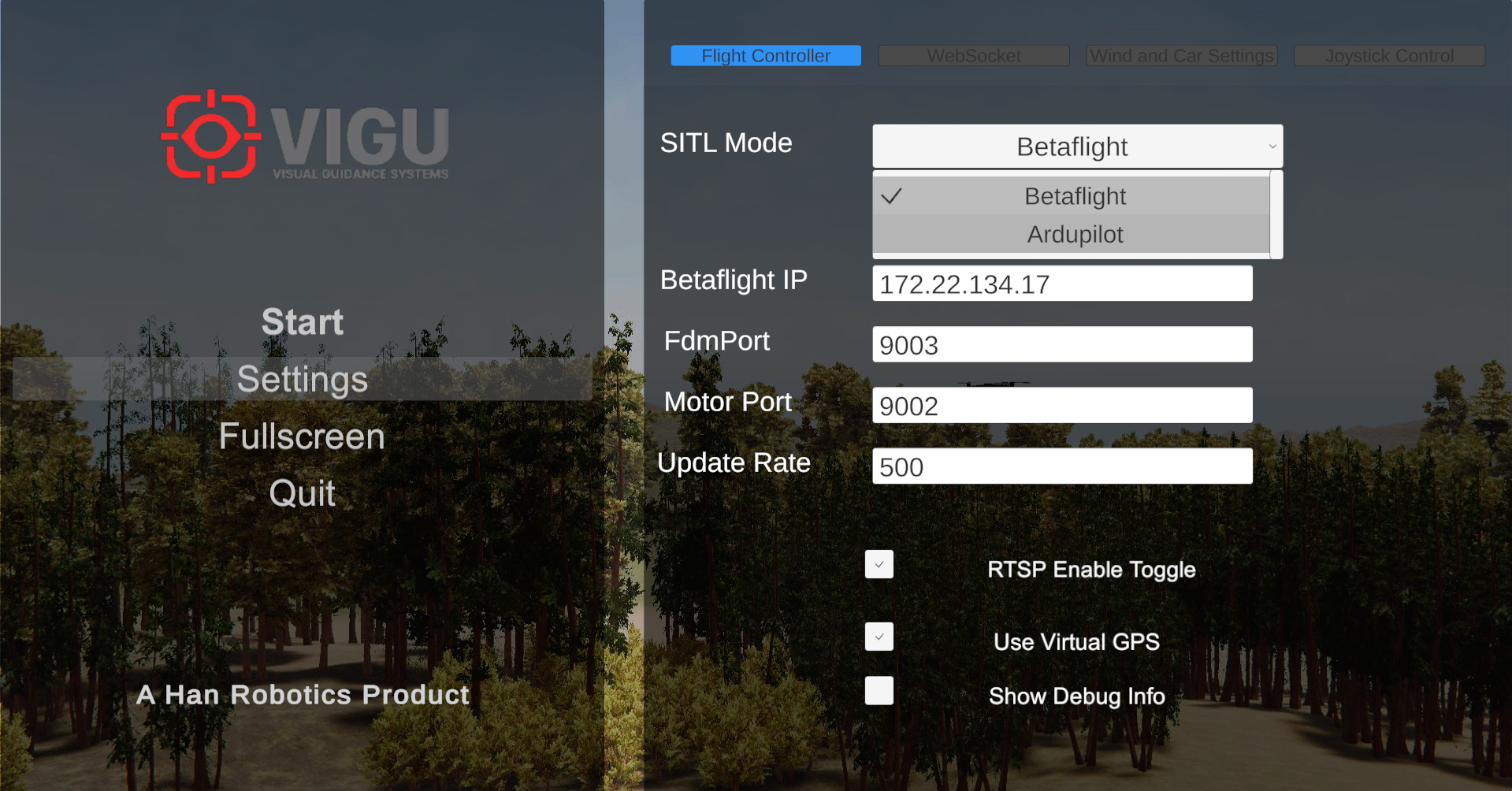
VIGU-Sim is a high-fidelity simulation platform developed to test drone autonomous flight algorithms and flight controller software in a risk-free environment. It combines SITL (Software In The Loop) technology based on Windows Subsystem for Linux (WSL2) with the visual and physical power of the Unity game engine.
Unlike traditional simulators, VIGU-Sim is not just a game; it runs the exact same Betaflight and Ardupilot firmware (SITL version) used on real drones. The drone in the Unity environment sends virtual sensor data to SITL and reacts realistically based on motor commands received. This ensures that PID tunings or autonomous missions developed in the simulation perform similarly in the real world.
Key Features:
- Real-Time SITL Integration: Seamless communication between Linux-based code and Windows via WSL2 infrastructure.
- 1:1 Flight Physics: A test environment that matches 99% of real-world flight dynamics.
- Advanced Connectivity: Low-latency WebSocket bridge between Unity and SITL.
- Flexible Control: Support for real RC transmitters or virtual joysticks.